
Reading time less than 10 minutes.
Contents
Version Info
Navigation
WebApp
Cloud
Version info
Branch: Master
Date: 25.06.2024
Version: 2024.01
Navigation
Teach & Repeat
The Teach & Repeat cleaning mode introduces several new enhancements. It now includes
obstacle avoidance, allowing the robot to deviate from its path when encountering obstacles.
Additionally, red zones are now included in the Teach & Repeat process, striving to have
more efficient navigation. Lastly, a new rescue feature for this mode has been included to
enhance safety during the robot’s cleaning operations.
- Path deviation is allowed, with a default value of up to 1 meter away from the original
path. Users can also adjust the deviation distance by changing the configuration
through the web-app (in advanced mode). - The K900 considers red zones and obstacles when activating the Teach & Repeat
mode. - If the path is completely blocked, the K900 will wait for up to 1 minute for clearance to
continue. Otherwise, if the path stays obstructed, the robot will abort its current
course and return to the charging station.
Take in consideration:
- Accuracy between teach and repeat paths: +/-10 cm.
- Because of the robot’s nature to try and avoid obstacles, it will not move close to the
wall.

Figure 1: Image shows how the obstacle avoidance feature works in case of a new obstacle appearing after the Teach & Repeat path has been saved.
Wall-follow
For our Wall-follow mode, loop detection has been improved to be more intelligent and
efficient. The robot knows when the perimeter is completely cleaned.
WebApp
Mapping
Mapping new or existing rooms now includes environment configuration so to report details
of existing or potential hazards.
Mapping includes a 4-step environment configurations:
- Environment pollution: Assessing the pollution level in the environment by adjusting
brush speed, driving speed, sensor sensitivity, and vacuum power.
Figure 2. Environment pollution.
- Environment hazard: Identify any potential hazard present (hint: for more information about environment hazard settings and its behaviour, please refer to SW Release note 2023.01).

Figure 3. Environment hazard.
- Environment type: Considering whether the room layout often changes.

Figure 4. Environment type.
- Independent configurations: Specific indications of requirements for this room.

Figure 5. Independent configurations.
Figures 2-5: Environment configuration during mapping set-up consists of 4 stages meant to
assess, identify, and implement the necessary precautionary measures that the robot will need to perform successfully in said environment.Configure Navigator Settings
The user can configure navigator settings like:
- Lane overlapping,
- Wall distance,
- Maximum allowed path deviation in Teach & Repeat.

Available Wi-Fi networks
Wi-Fi configuration now has the possibility to display all the available networks and to add
more than one network to your default options.

Event log
- Starts and stops: Starts and stops are recorded in the event log and will be accompanied by a detailed reason.

Figure 8: Reasons for stopping a run. In this case due to finishing the Teach & Repeat zone because of the manual button being pressed in the WebApp, then the robot successfully reached the charging station.
- Past events: Past entries in the event log remain accessible, even after the robot has been shut down.

Granular cleaning configuration
Enhanced cleaning settings now allow you to customize the activation and deactivation of the
beeper and warning light independently. The front lights cannot be adjusted anymore: they
are always flashing during cleaning and off otherwise.
Settings can be applied on all three levels (robot, room, and zone):
- Robot cleaning settings;

Figure 10: Adjusting cleaning configuration on robot level.
- Room cleaning configuration;

Figure 11: Adjusting cleaning configuration on room level.
- Zone planner cleaning settings.

Back-up/Restore
It is possible to back up the robot’s data to the servers. As well as restoring robot configuration with data saved on the server.
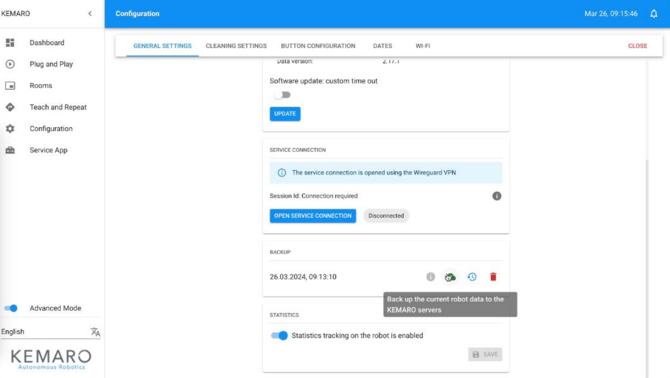
Figure 13: Current robot data can be backed up by clicking on the green cloud icon inside general settings (advanced mode).
Basic API commands
In this software version, the following basic API commands have been introduced:
- Emergency evacuation command: To move the robot onto the closest evacuation point.

Figure 14: The tool panel on the right of the web-app now includes Evacuation Place feature. Emergency evacuation points or zones can only be added in the evacuation planner mode.
- Emergency red zones: Red zones which are only loaded once in emergency mode

Figure 15: The tool panel on the right of the web-app now includes Emergency Red Zones feature in the evacuation planner mode.
In the next release, we will introduce a new Open-door feature. The aim is that the robot can
open automated doors such that its cleaning region is enlarged, e.g. in
combination with a warehouse guidance system.
Previous Webserver
The current web-app has completely replaced our previous webserver.
Robust update (version 2023.02 or later)
The old software will still be available for use in case the new software download fails during the update.
New service connection
A new service connection via VPN is introduced in this software version. To use this new connection, a new client tool has to be used, which will be introduced soon. The new connection will provide advantages in usability, stability, and availability.
In this SW Version, both old and new connections can be used as follow:
- Activate service connection with MMI (STOP & HOME) opens old and new service
connections; - Activate service connection with WebApp now opens only the new connection;
- The maintenance LED sign is only shown the connectivity state of the old connection;
- The new connection and its connectivity state is shown only in the WebApp.

Service App
The service app is not available during autonomous navigation.
New error states
Two more error states are introduced in this SW version:
- Cell imbalance error: When a battery cell imbalance error appears, the robot will drive backwards to disconnect itself from the charging station and will then continue to shut down. The next time the robot is powered on, it will display the error, and after a brief moment it will power itself down again. Please reach out to KEMARO support to replace the battery and restore the robot back to normal operation.

Figure 17: Cell imbalance error. - IMU error: IMU error state points out an error within the inertial measurement unit. If an IMU error repeatedly appears, please contact technical support in case the sensor needs to be replaced.

Figure 18: IMU error.
Cloud
Now it is possible to merge several single runs into one report. The purpose is to reduce the
number of reports, e.g. to have only one report per day (or per night). Another advantage is
that new information on the map (like new obstacles or free space) will be kept over the
defined time.
- The user is free to define which missions should be merged in the schedule on the
WebApp; - The charging time and run are now displayed during an active mission;
- If an error appears, the mission will be reported immediately.
 Figure 19: This WebApp cleaning schedule has three planned missions (blue, green, purple).
Figure 19: This WebApp cleaning schedule has three planned missions (blue, green, purple).

Figure 20: The cloud run report for Thursday shows the schedule of the previously mentioned figure.
Click here to download software release notes 2024.01 Master in a PDF.
More questions? Contact us at support@kemaro.ch!